常见减速器分类及原理
减速器是机械设计中常用的部件,常用于将主动电机的高速、低转矩转化为低俗高转矩。减速机中的主要参数是减速比,另外不同类型的减速器之间有不同的特点,这里介绍几种常见的减速器,分别是:涡轮蜗杆减速器、行星减速器、普通齿轮减速器、谐波减速器、摆线针轮减速器。
涡轮蜗杆减速器

组成
- 蜗杆:通常为螺旋状主动件,材料多为淬硬钢,具有高强度和耐磨性。
- 涡轮(蜗轮):与蜗杆啮合的从动件,常采用青铜等减摩材料,以降低摩擦损耗。
- 轴线布置:两轴空间垂直交叉,便于改变传动方向。
主要参数
- 传动比: $i = \frac{Z_2}{Z_1}$,其中 $Z_1$ 为蜗杆头数,$Z_2$为涡轮齿数。单头蜗杆可实现大减速比(如 $Z_2=40$ 时,$i=40:1$)。
- 模数:决定齿轮尺寸,需标准化选择。
- 导程角 $\lambda$:影响自锁和效率,小导程角利于自锁但效率低。
- 头数 $Z_1$:单头用于大减速比,多头提高效率但降低传动比。
应用场合
主动电机常用驱动电机、步进、伺服电机,常用于机构需要频繁启动、对精度要求不高的场合
优缺点
- 优点: 有反向自锁功能、减速比可以很大
- 缺点: 减速比越大体积越大传动结构效率低、精度低,不适合精度要求高的场合
生产厂家
SEW、诺德、住友
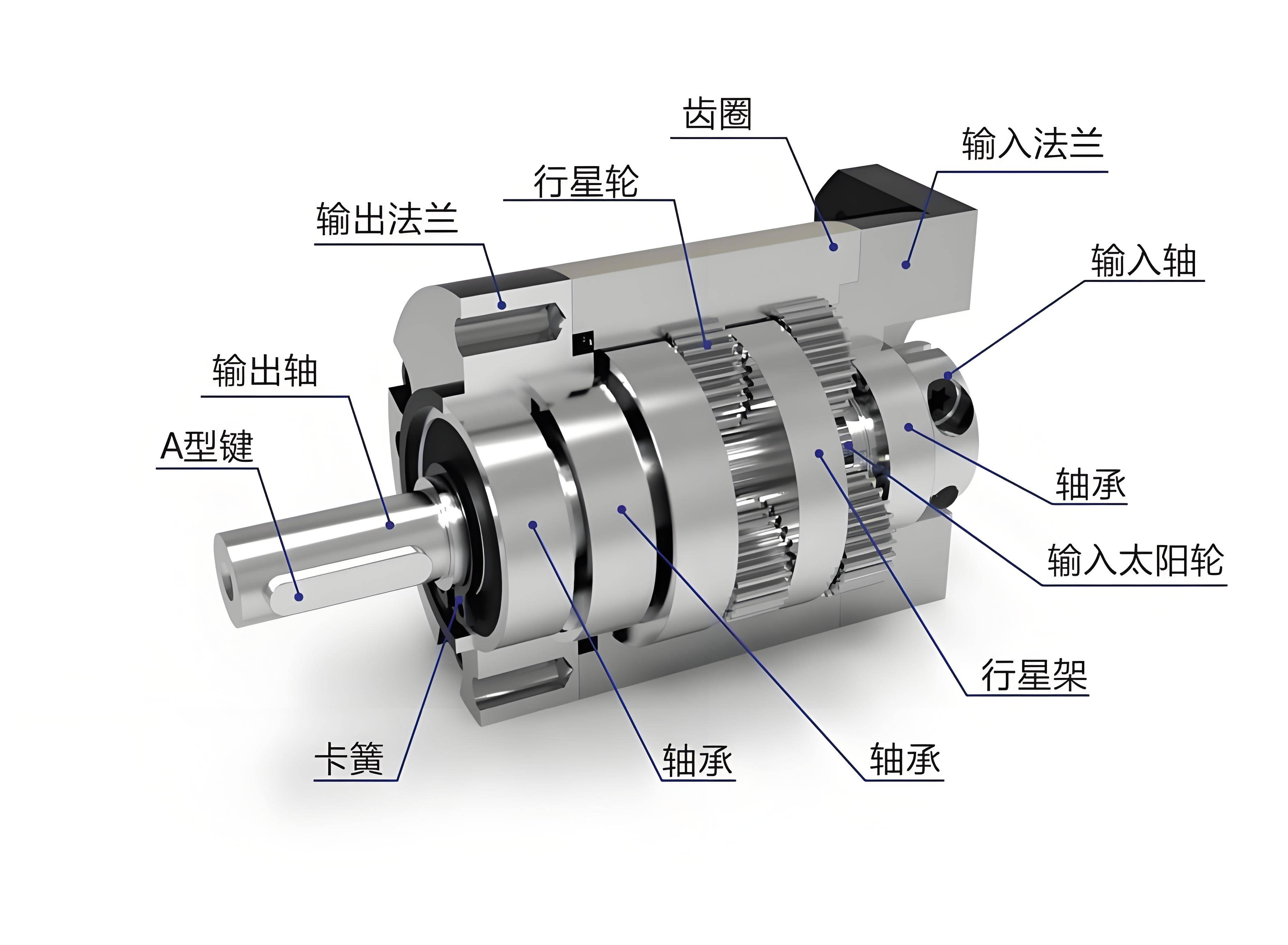
行星齿轮减速器

组成
- 太阳轮(中心轮):位于中心,通常为主动输入件。
- 行星轮:多个小齿轮(通常3-6个)均匀分布在太阳轮周围,同时与太阳轮和外齿圈啮合。
- 行星架(行星臂):固定行星轮并连接输出轴,传递动力。
- 外齿圈(内齿圈):固定在壳体上或作为可动件,与行星轮啮合。
主要参数
- 传动比(单级固定齿圈模式):
$$
i = 1 + \frac{Z_r}{Z_s}
$$
其中$Z_s$为太阳轮齿数,$Z_r$为外齿圈齿数示例:若太阳轮20齿,齿圈60齿,则 $i = 1 + 60/20 = 4:1$ 。
应用场合
- 步进/伺服
- 减速比要求大
- 单级:10以内
- 二级:100以内
- 三级:1000以内
优缺点
- 优点:精度高、体积小、承载强、啮合面积大、刚性好、内部结构平衡
- 缺点:成本高
生产厂家
世协、新宝、纽格尔
普通齿轮减速器

组成
- 输入轴与输出轴:通常为平行轴布局,通过齿轮啮合传递动力。
- 齿轮类型:
- 直齿轮:结构简单,成本低,但啮合冲击大、噪音较高。
- 斜齿轮:传动平稳、噪音低,但产生轴向力需推力轴承支撑。
- 人字齿轮:结合双斜齿轮消除轴向力,用于重载场景(如船舶传动)。
- 箱体:支撑齿轮轴并保护内部组件,需具备足够刚性和密封性。
主要参数
- 传动比:
- 单级传动比:$i = \frac{Z_2}{Z_1}$,其中 $Z_1$为主动轮齿数,$Z_2$ 为从动轮齿数。
- 多级传动比:总传动比$i_{\text{总}} = i_1 \times i_2 \times \cdots \times i_n$。
应用场合
- 应用广泛
- 圆锥齿轮减速器
优缺点
- 优点:高效率(单级效率达90%-98%,斜齿轮效率更高)、结构简单、可靠性高
- 缺点:体积较大
谐波减速器

组成
- 波发生器:椭圆形凸轮或轴承组件,作为主动输入件,迫使柔轮周期性变形。
- 柔轮:薄壁弹性金属杯状结构(通常为合金钢),外齿与刚轮啮合,随波发生器变形。
- 刚轮:刚性内齿圈,齿数略多于柔轮(通常多2齿),固定在壳体上或作为输出件。
主要参数
- 传动比: $i = \frac{Z_r - Z_f}{Z_f}$, 其中$Z_r$为刚轮齿数,$Z_f$为柔轮齿数
示例:柔轮100齿,刚轮102齿,则 ( i = (102-100)/100 = 1:50 )。
- 弹性变形传动:波发生器旋转使柔轮发生椭圆变形,柔轮与刚轮齿啮合位置周期性移动。
应用场合
- 光刻机晶圆台驱动
- 机器人关节
- 高精度减速要求
优缺点
- 优点: 超精密传动(齿间多齿啮合(30%以上齿接触),传动精度达角秒级(<1 arcmin))、超大减速比(单级传动比可达30:1至320:1,无需多级串联)、紧凑轻量(比行星减速器轻30%-50%)
- 缺点:承载能力有限(通常<500 Nm)、寿命与疲劳(柔轮周期性变形易引发金属疲劳失效)、温升敏感
摆线针轮减速器

组成
- 输入轴:连接电机或动力源,带动偏心套旋转。
- 摆线轮:带有摆线齿形的圆盘,通过偏心套驱动,实现周期性摆动。
- 针轮(针齿壳):固定于壳体内侧,环形排列的圆柱销(针齿)与摆线轮啮合。
- 输出机构:通常为W机构(由柱销和输出盘组成),将摆线轮的摆动转换为输出轴的单向旋转。
主要参数
- 传动比: $i = \frac{Z_p}{Z_b - Z_p}$,其中$Z_b$为摆线轮齿数,$Z_p$为针轮针齿数
示例:摆线轮39齿,针轮40针,则 $i = 40/(40-39) = 40:1$。
- 偏心运动转化:输入轴通过偏心套驱动摆线轮作平面摆动,摆线轮齿与针轮针齿啮合,迫使摆线轮产生差动运动。
应用场合
- 重工业设备
- 特种设备
- 高精度传动
优缺点
- 优点:高传动比(单级传动比可达7:1至119:1)、高承载能力、传动效率高(单级效率可达90%-95%)、结构紧凑
- 缺点:振动与噪音(偏心运动易引发振动,高速运行时需降噪设计)、制造精度要求高
总结
以上是几种基础的减速器,其他类型的减速器变种基本上是以上减速器的排列组合,比如RV减速器(旋转矢量减速器,Rotary Vector Decelerator)就是由一个行星齿轮减速器的前级和一个摆线针轮减速器的后级组成)。
| 特性 | 摆线针轮减速器 | 谐波减速器 | 行星齿轮减速器 | 涡轮蜗杆减速器 |
|---|---|---|---|---|
| 单级传动比范围 | 7:1-119:1 | 30:1-320:1 | 3:1-10:1 | 5:1-100:1 |
| 传动效率 | 高(90%-95%) | 中高(80%-90%) | 高(95%-98%) | 低(30%-70%) |
| 承载能力 | 高(多齿均载) | 低-中(柔轮限制) | 高(多行星轮分担) | 中 |
| 体积/重量 | 紧凑(轴向短) | 极紧凑轻量 | 紧凑(同轴) | 中等 |
| 噪音水平 | 中高(需降噪设计) | 低 | 低(斜齿轮) | 低 |
| 制造成本 | 中高 | 高 | 高 | 中 |
| 典型寿命 | 长(10,000-30,000小时) | 中(柔轮疲劳) | 长 | 中(磨损主导) |
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 LP瞎逼逼!
 wechat
wechat alipay
alipay
评论